Управление двигателем при помощи смартфона
Общая схема решения
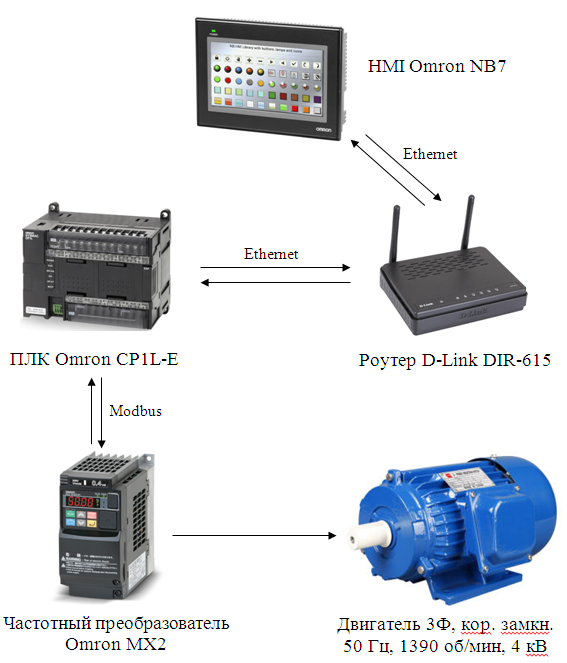
1. Организация связи между ПЛК и HMI по каналу Ethernet.
Для организации связи между программируемым логическим контроллером Omron CP1L-E и HMI Omron NB7 по каналу Ethernet воспользуемся программным обеспечением NB-Designer от компании Omron. Из списка слева выберем используемые нами панель оператора (HMI) и ПЛК. Интерфейс связи выбираем Ethernet. (Рис.1)
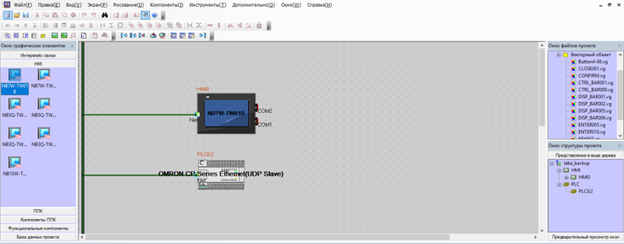
Рис. 1
В параметрах HMI указываем: IP-адрес: 192.168.250.1; Маска подсети: 255.255.255.0 (Рис. 2)
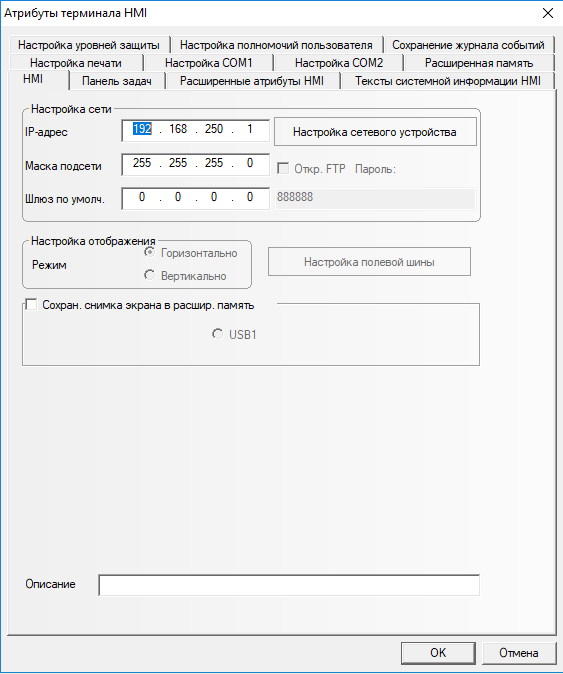
Рис. 2
В параметрах ПЛК указываем: IP-адрес: 192.168.250.2; Порт: 9600; ID узла:2 (Рис. 3)
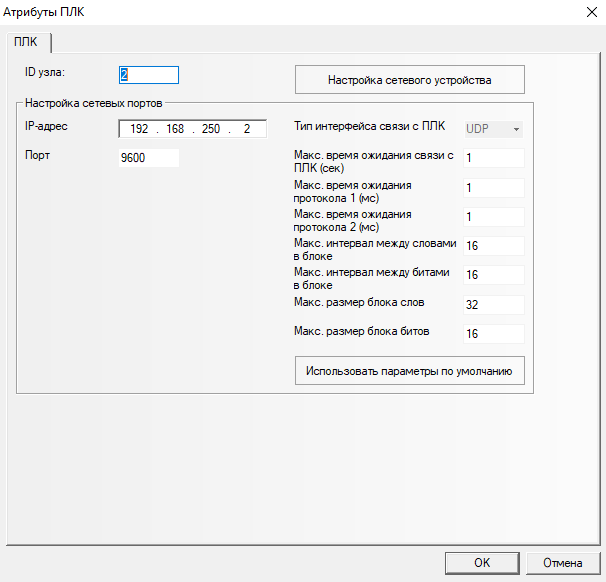
Рис. 3
2. Реализация управления частотным преобразователем с HMI по сети Modbus RTU
В приведенном ниже примере используется ПЛК CP1L-E от компании Omron с дополнительным последовательным модулем CP1W-CIF11 для связи с преобразователем частоты MX2 по сети Modbus. Это позволит нам реализовать такие функции, как запуск/останов двигателя, контроль скорости, мониторинг состояния, а также сброс ошибок.
Преобразователь MX2 будет полностью управляться командами Modbus по последовательной линий связи RS485, поэтому не требуется дополнительная проводка ввода/вывода. Проводка коммуникационной связи подключается к клеммам «SN» и «SP» преобразователя частоты MX2 и винтовым клеммам модуля связи CP1W-CIF11.
Для подключения CP1W-CIF11 к преобразователю частоты MX2 выполним следующие шаги:
- Установите DIP-переключатель в положение ON (вправо) для клеммного резистора MX Этот переключатель обозначен как SW1, и его местоположение показано на рисунке ниже (Рис. 4 слева).
- Установите DIP-переключатели на задней панели устройства CP1W-CIF11 в соответствии с рисунком ниже (Рис. 4 справа).
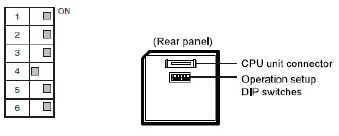
Рис. 4
- Подключите клемму MX2 с маркировкой «SN» к клемме CP1W-CIF11 c маркировкой «RDA-».
- Подключите клемму MX2 с маркировкой «SP» к клемме CP1W-CIF11 c маркировкой «RDA+» (Рис. 5).
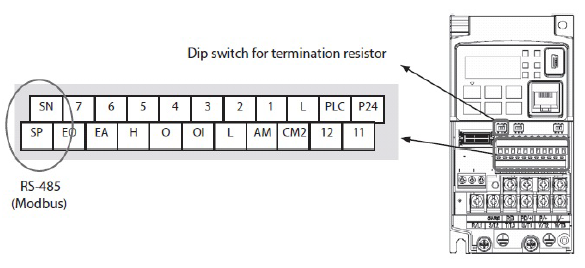
Рис. 5
По умолчанию MX2 настроен для приема задания скорости и запускает командные сигналы от встроенной клавиатуры передней панели и внешних цифровых входных сигналов. Для того, чтобы MX2 полностью управлялся через Modbus, изменим следующие параметры (см. Рис 6) преобразователя частоты через его переднюю панель. Обязательно перезагрузите ПЧ, чтобы изменения вступили в силу.
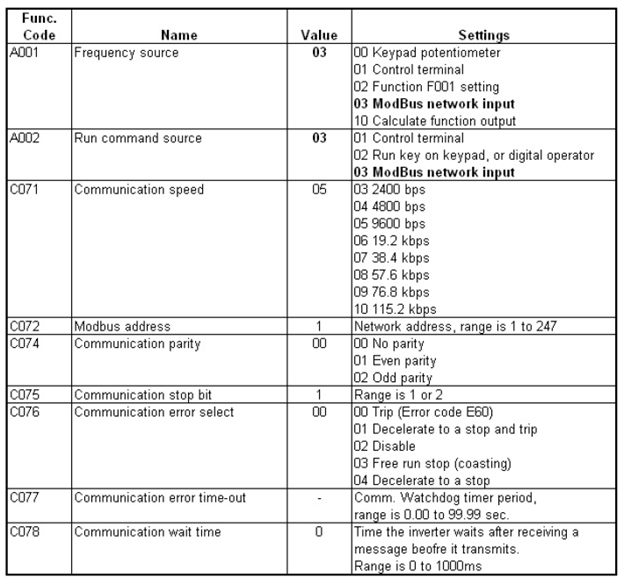
Рис. 6
В данном проекте используются следующие настройки Modbus: скорость передачи данных 9600 бит/с, 8 бит данных, 1 стоповый бит, отсутствие контроля четности, сетевой адрес (номер узла): 1.
Для программирования Omron CP1L-E используется программное обеспечение CX-Programmer. Соединим наш ПК с ПЛК при помощи Ethernet кабеля. При создании проекта укажем модель нашего ПЛК и тип соединения: Ethernet. В параметрах Ethernet укажем IP адрес 192.168.250.2 и номер порта 9600. (см. Рис 7)


Рис. 7
Программа ПЛК полностью закомментирована для легкого понимания функциональности и работы (Рис. 8).Она включает функциональный блок, который обеспечивает контроль и мониторинг ПЧ MX2 с использованием протокола Modbus.
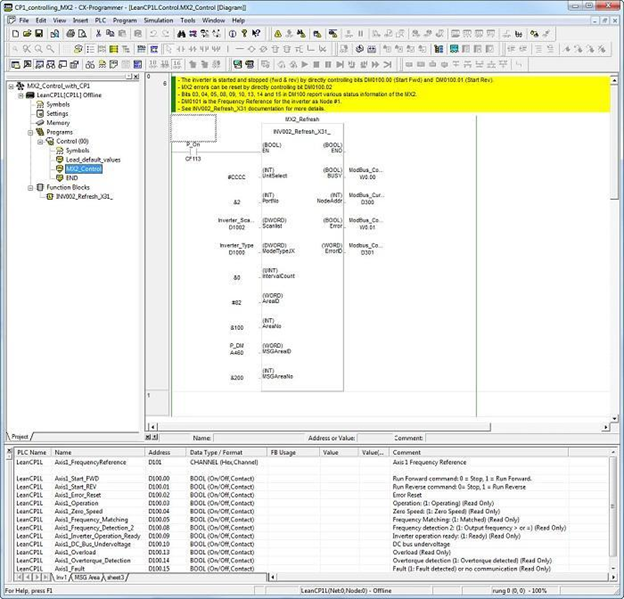
Рис. 8
В руководстве пользователя описаны переменные, которые используются в данной программе.
В нашем проекте, область данных ПЛК, в которой будут хранится переменные для управления ПЧ: D.
Булева переменная, которая отвечает за пуск двигателя, хранится в адресе D100.00. Если она равна «1» – двигатель запускается, «0» - двигатель останавливается.
Переменная, отвечающая за частоту вращения двигателя, хранится в адресе D101. Принимает значения от 0 до 5000 (Гц).
Скомпилируем проект и загрузим его с ПК на ПЛК с помощью Ehternet кабеля.
Создадим проект для HMI, чтобы с него заносить нужные нам значения в область памяти ПЛК (Рис 9).
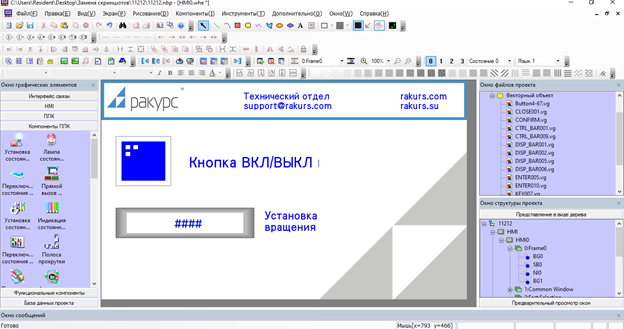
Рис. 9
Двойным щелчком по главному экрану откроем меню и установим белый цвет фона. Загрузим изображения фирменного стиля моего университета с помощью меню: Рисование → Новый графический объект. Укажем тип изображения: растровый. Добавим его в проект при помощи функционального компонента: растровый объект (Рис. 10).
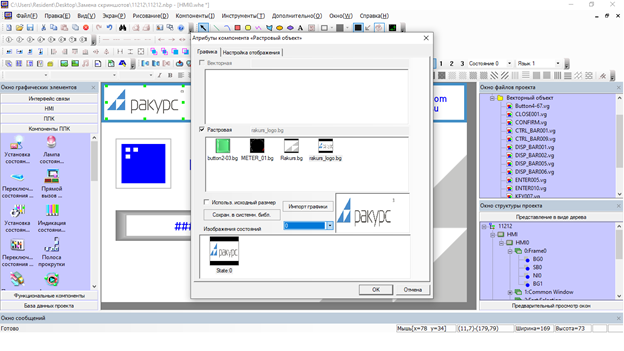
Рис. 10
Добавим кнопку запуска двигателя. Из бокового меню выберем: Компоненты ПЛК→Установка состояния бита. В параметрах укажем тип адреса: D_bit, адрес: 100.00 (Рис. 11).
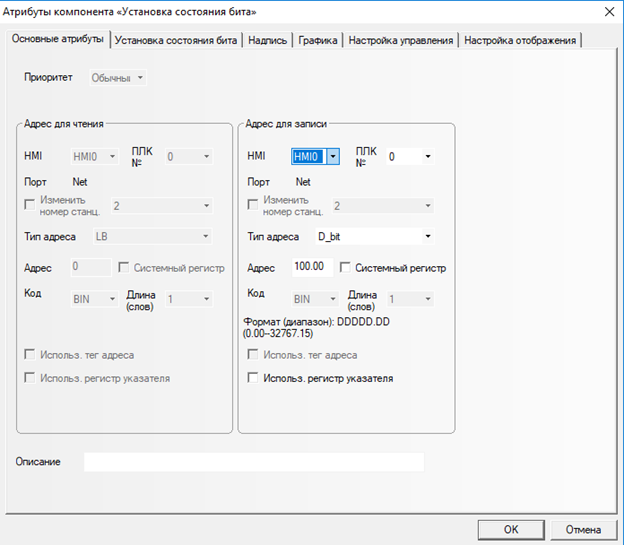
Рис. 11
Добавим поле ввода данных частоты вращения двигателя. Из бокового меню выберем: Компоненты ПЛК → Ввод числа. В параметрах укажем тип адреса: D, адрес: 101 (Рис. 12).
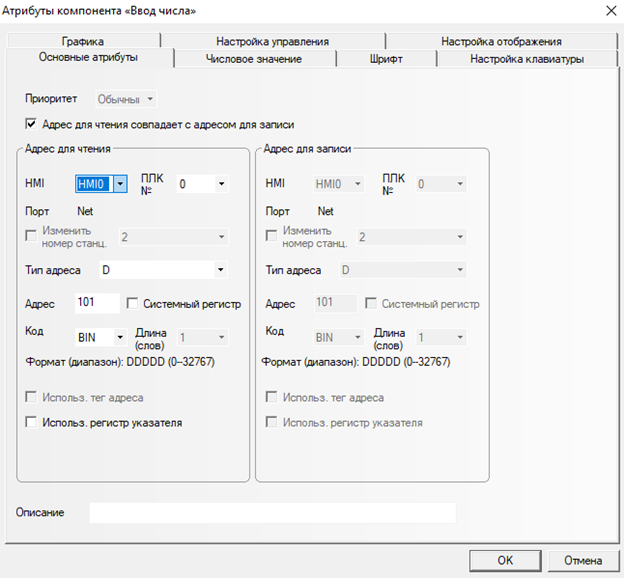
Рис. 12
Для добавления текста перейдем в пункт меню: Рисование → Статический текст.
В верней панели ПО NB-Designer перейдем: Инструменты → Имитация в автономном режиме (Рис 13). При нажатии компонента «Ввод числа» появится экранная клавиатура для ввода частоты вращения двигателя.
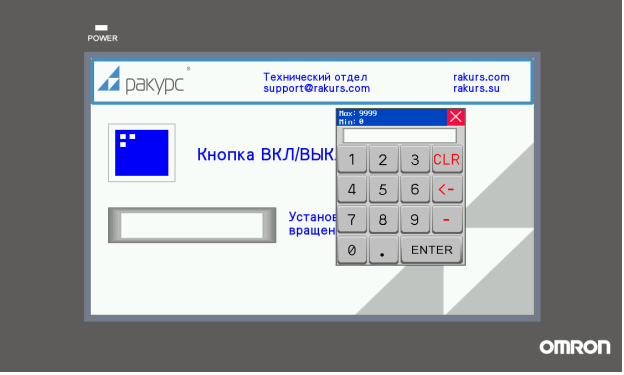
Рис. 13
Скомпилируем проект и загрузим с ПК в HMI при помощи USB кабеля.
Соединим ПЛК и HMI через Ethernet кабель.
Теперь мы можем управлять частотным преобразователем MX2 с HMI NB7.
3. Организация доступа к HMI NB7 через web-интерфейс.
Перейдем в пункт меню: Инструменты → Диспетчер системы. В меню слева выберем: веб-интерфейс (Рис. 14).
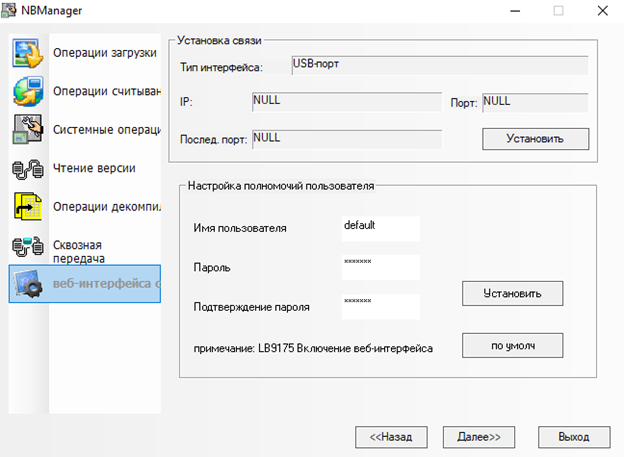
Рис. 14
Имя пользователя и пароль для доступа к панели в нашем демо-проекте оставим стандартными: default. Для включения веб интерфейса необходимо добавить компонент «Установка состояния бита», который будет записывать бит данных в адрес LB9175. Если в данной ячейке памяти будет хранится «1» - веб-интерфейс включен, если «0» - выключен (Рис. 15).
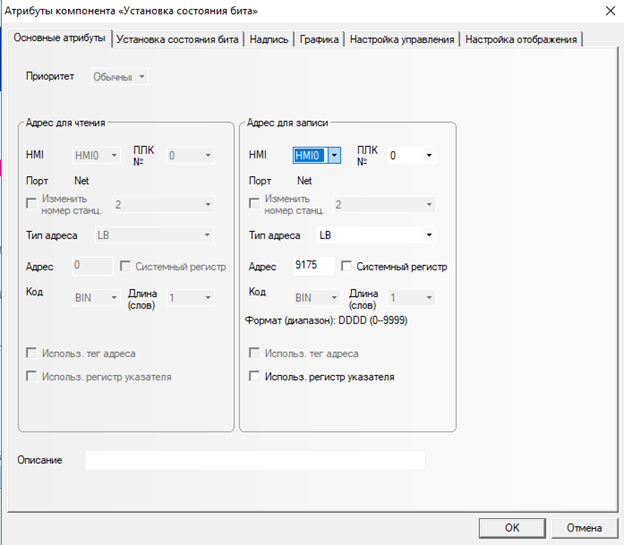
Рис. 15
Скомпилируем проект и загрузим с ПК в HMI при помощи USB кабеля.
Соединим HMI NB7 с ПЛК CP1L-E с помощью роутера.
В настройках роутера указываем: IP-адрес: 192.168.250.3; Маска подсети: 255.255.255.0
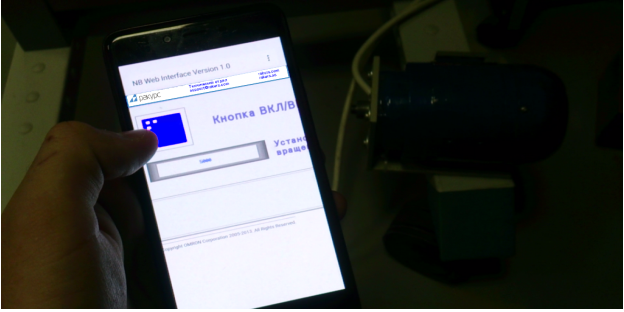
Для примера рассмотрим управление HMI при помощи смартфона. Подключимся к сети Wi-Fi роутера D-Link DIR-615. Откроем браузер и перейдем по адресу HMI в сети (192.168.250.1) (cм. Раздел 2). Введем имя пользователя и пароль (default). Теперь мы можем непосредственно управлять частотным преобразователем с помощью смартфона (Рис. 16).